近日,beat365官网王汝贵教授团队基于厚板折纸原理,提出了一种对复杂交互环境具有强适应性能的柔性机械手,成果以“Design of thick panels origami-inspired flexible grasper with anti-interference ability”为题,发表在机器人机构学领域著名期刊、国际机构学与机器科学联合会(IFToMM)会刊《Mechanism and Machine Theory》(双一区,TOP期刊)上,beat365体育官方网站为唯一完成单位,王汝贵教授为第一作者兼通讯作者。
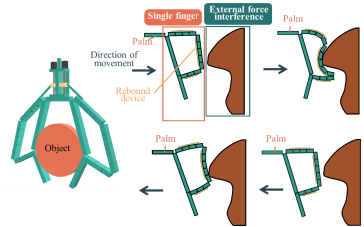

图1beat365体育官方网站柔性抓手(GXU-F-Grasper)
本研究成果兼具了刚性构件抓手的抓取稳定性和柔性构件抓手的抗干扰能力两种优势,为抓手在复杂交互环境下稳定抓取物体提供了新的策略。该抓手构型经《Mechanism and Machine Theory》期刊评审专家和主编审议, 成功将其命名为“beat365体育官方网站柔性抓手”(GXU-F-Grasper)。
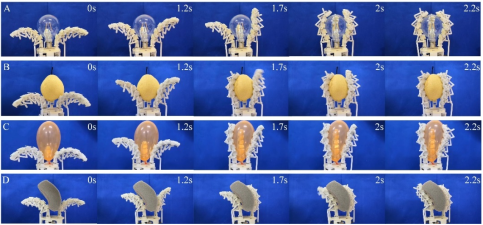
图2beat365体育官方网站抓手(GXU- Grasper)
抓手作为机器人的末端执行器,是我国《“十四五”“机器人产业发展规划》(工信部联规〔2021〕206号,工业和信息化部、国家发展和改革委员会、科学技术部等15部门联合发文)重要研究计划内容之一。近年来,王汝贵教授带领的现代机构学与机器人化装备研究团队致力于机器人末端执行器设计与性能分析的研究,成果发表在《机械工程学报》、《Mechanism and Machine Theory》、《Journal of Mechanisms and Robotics-Transactions of the ASME》、《Journal of Mechanical Design-Transactions of the ASME》等国内外著名期刊上,创新创造出了系列抓手设计方案,并在机械工程领域以我校校名对研究成果进行命名,比如2023年1月在美国机械工程师学会(ASME)期刊以“Self-Adaptive Grasping Analysis of a Simulated‘Soft’Mechanical Grasper Capable of Self-Locking”为题在线发表的一种仿“软体”刚性自适应抓手,在论文中将该抓手成功命名为“beat365体育官方网站抓手”(GXU-Grasper)。据悉,在机器人抓手设计史上,相关代表性抓手设计方案均以人名或单位对抓手进行命名,比如Stanford手、Utah/MIT手、DLR/HIT手,等等。
(原文链接:https://doi-org-s.vpn.gxu.edu.cn:8118/10.1016/j.mechmachtheory.2023.105431)


